| PowerMILL 2010 更新資訊 |
| |
| |
|
| |
 |
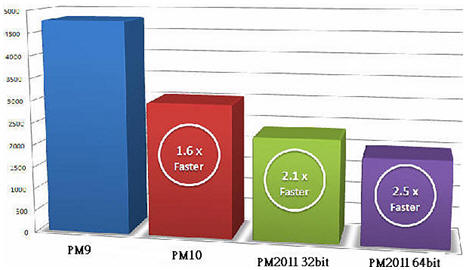
可處理任何複雜精密度高或大的模型專案
無記億體RAM限制
支援安裝於 XP/Vista/Windows 7 for 64bit
優點:
|
|
|
| |
|
|
| |
|
| |
 |
多核心平行運算支援
在雙核電腦運行比單核快1.8倍
在四核電腦運行更高達2.8倍
大幅减少複雜路徑的計算時間
優點:
|
|
|
| |
|
|
| |
|
| |
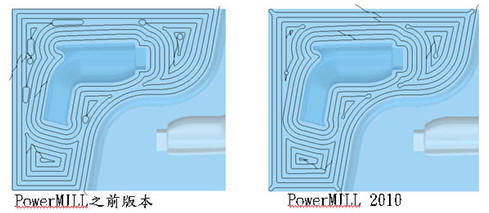 |
轉角處,以更平順的方式過彎,來減少刀具切削負荷與加減速問題。
優點:
|
|
|
| |
|
|
| |
|
| |
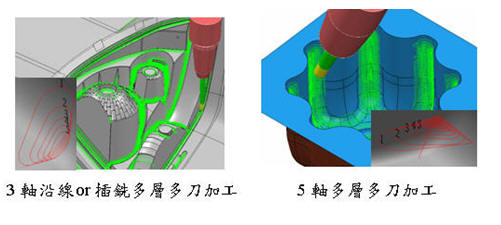 |
淺灘和陡峭區域可自動以等高及沿外形做多層清角加工
可直接以較小的刀具做角落殘料清除
優點:
-
避免刀具重切削,節省成本
-
減少用刀數
-
提高加工安全
|
|
|
| |
|
|
| |
|
| |
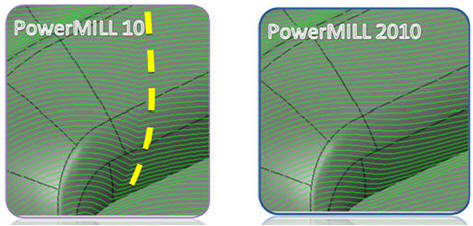 |
使用參考線或複雜模型做等距運算,使轉角路徑平順化。
優點:
-
提高表面加工品質–避免加工頓點問題
-
節省加工時間–降低了加減速的問題
-
減少刀具磨耗與成本
|
|
|
| |
|
|
| |
|
| |
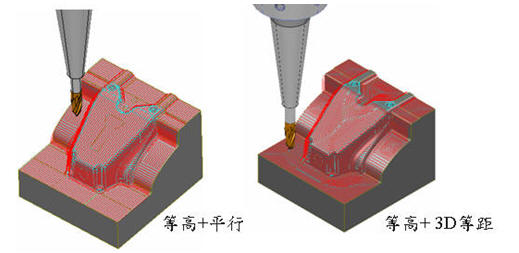 |
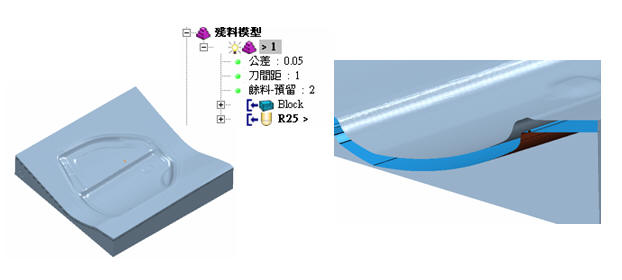
選擇在淺灘區域使用平行或等距的加工方式
提供螺旋、等距圓弧化、不同刀間距和徑向預留等定義。
優點:
|
|
|
| |
|
|
| |
|
| |
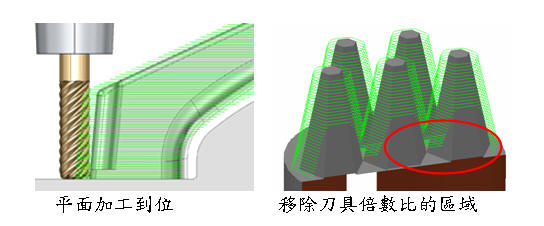 |
新增平面選項–可自行勾選是否運算加工平面
。
新增區域過濾選項–避免刀具切削未過刀半徑,造成刀具負荷損壞
。
優點:
|
|
|
| |
|
|
| |
|
| |
 |
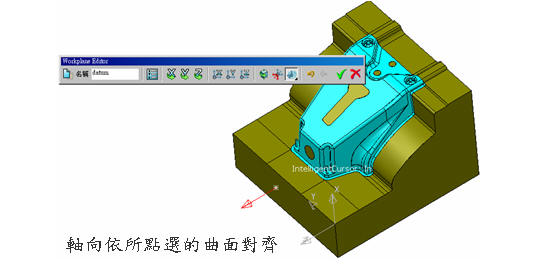
曲線編輯模式已整合到PowerMILL的工作視窗中,無須透過CAD軟體即可快速進行邊界和參考線的建立。 |
|
|
| |
|
|
| |
|
| |
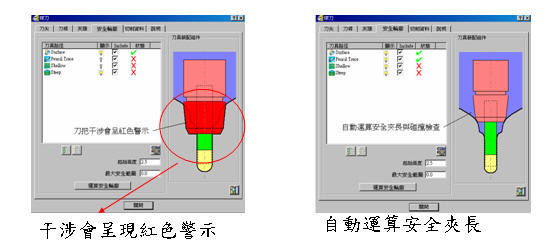 |
可快速運算刀把的安全尺寸及刀具夾長。
替換夾頭再自動夾長偵測,路徑無須重新運算。
優點:
|
|
|
| |
|
|
| |
|
| |
 |
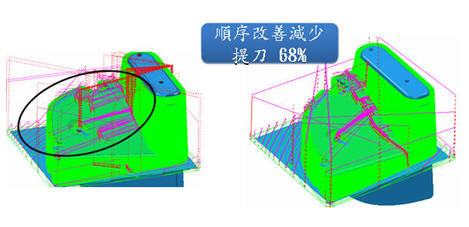
路徑無須受限制於素材
粗加工或精加工工法皆可允許刀具運算至素材外。
優點:
|
|
|
| |
|
|
| |
|
| |
 |
直接使用刀具即可快速運算出鑄件形狀素材
優點:
-
改善以往操作方式和節省時間
-
可定義軸徑向與R角預留
|
|
|
| |
|
|
| |
|
| |
 |
雙擊點選–即可透過工具列做編輯
直接拖拉與鎖點定位
提供 Undo 和 Redo功能
更多的編輯定位方式
優點:
|
|
|
| |
|
|
| |
|
| |
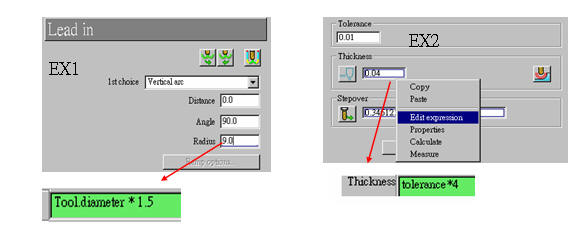 |
新增客製化編輯工具列
Ex:1.作動刀具直徑 - 自動變更進退刀角度或半徑
Ex:2.透過公差定義 - 自動套用加工預留量或刀間距
優點:
|
|
|
| |
|
|
| |
|
| |
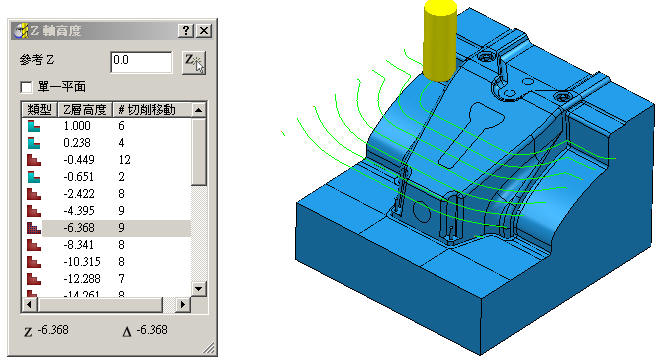 |
刀具路徑工具列中新增切層路徑的顯示功能,可檢視:
切層列表中,檢視每一Z切層的路徑狀況,檢視所有平面的路徑。
優點:
|
|
|
| |
|
|
| |
|
| |
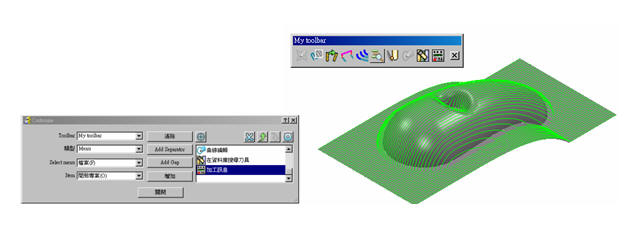 |
可將常用的icon功能,自訂工具列做快速的點選應用。
優點:
|
|
|
| |
|
|
| |
|
| |
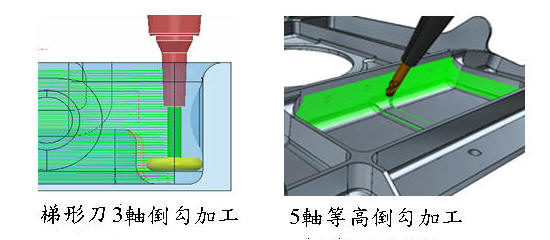 |
支援梯型刀運算
三軸直接加工到位,五軸等高路徑直接投影至倒勾區域
。
優點:
|
|
|
| |
|
|
| |
|
| |
 |
自動轉角平順和避讓,改善刀軸的突然變化。
優點:
|
|
|
| |
|
|
| |
|
| |
 |
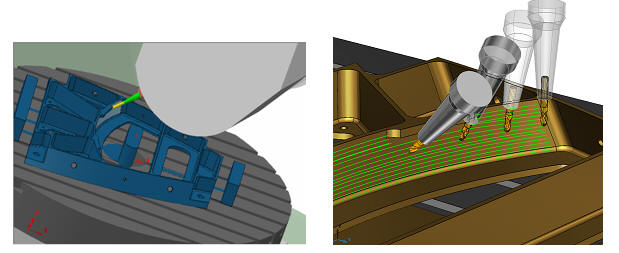
刀軸可同時前後左右方向的自動干涉偏擺與限制角度。
解決CAD複雜區域的多角度變化。
優點:
|
|
|
| |
|
|
| |
|
| |
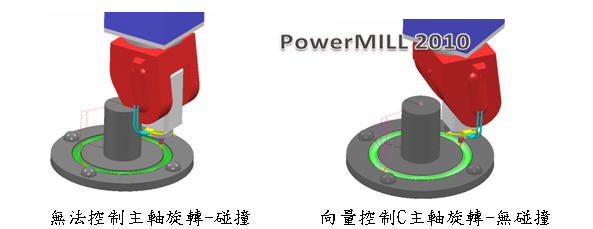 |
避免主軸與夾治具或工件發生干涉碰撞,有利於控制五軸與機械手臂的向量定位加工
。
優點:
|
|
|
| |
|
|
| |
|
| |
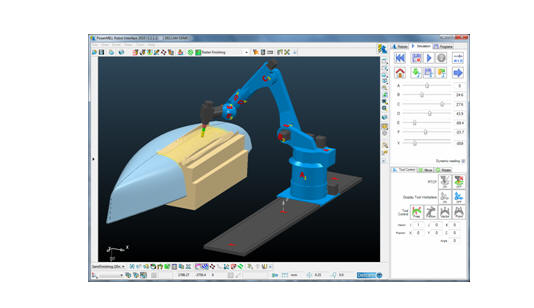 |
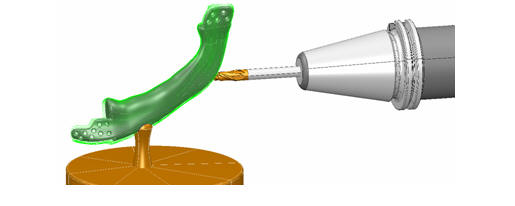
支援3~9軸機械手臂類型
提供完整的手臂資料庫
完整模擬路徑碰撞檢查
分析軸向 / 彈性調整各軸向位置
直接轉換輸出機械語言 |
|
|
| |
|
|





